

RoboCam
Usando o RoboCam, você pode controlar seu próprio robô LEGO Mindstorms EV3, Android ou Raspberry Pi.
Guia de início rápido (apenas para aqueles que têm um kit educacional de LEGO Mindstorms EV3 (45544)):
1. Monte o Pesquisador EV3 (a instrução: https://goo.gl/yPU4sa), ligue-o e verifique se o Bluetooth está funcionando.
2. Instale o aplicativo RoboCam em um smartphone (doravante, Telefone 1).
3. Ligue o Bluetooth do telefone 1 e verifique se o telefone 1 e o EV3 estão conectados via Bluetooth (eles devem estar emparelhados).
4. Conecte o telefone 1 e o smartphone que você usará para controlar o robô (daqui em diante, telefone 2) no mesmo roteador Wi-Fi.
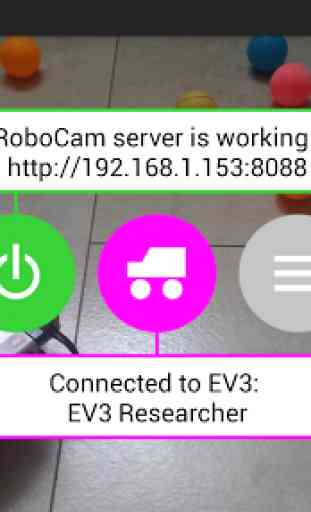
5. Inicie um servidor RoboCam. Para isso, aperte o botão verde esquerdo.
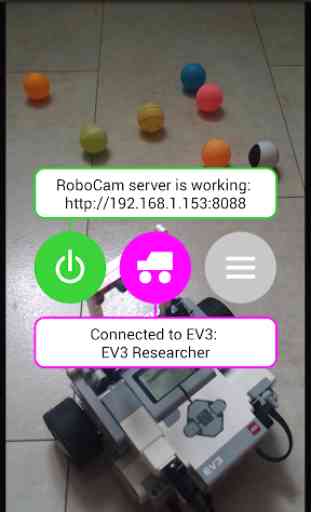
6. Conecte o telefone 1 ao robô. Para isso, aperte o botão magenta no meio.
7. Abra o Google Chrome no telefone 2 e vá para o link mostrado no aplicativo RoboCam no telefone 1.
8. Faça o login no telefone 2 (por padrão use admin e 123).
9. No telefone 2 aparecem dois joysticks e vídeo da câmera do telefone 1. Bloqueie o telefone e conecte-o ao robô.
10. Agora você pode controlar seu robô pelo telefone 2.
Se você tiver um kit inicial do LEGO Mindstorms EV3 (31313) ou quiser controlar outro robô EV3 em vez do Pesquisador EV3, será necessário configurar o aplicativo RoboCam. Veja as configurações do RoboCam.
Para usar o aplicativo, você precisa saber duas coisas: como configurar a conexão e como o controle acontece.
Esse é o manual rápido sobre como definir a conexão padrão. Necessidade: Robô EV3, smartphone Android com o RoboCam instalado (doravante, Phone 1) e o smartphone ou tablet (Android, iOS ou Windows) com um navegador moderno com suporte a HTML5 (doravante, o telefone 2). O telefone 1 é conectado ao EV3 via Bluetooth (os dispositivos devem estar pré-emparelhados!). Depois de iniciar o servidor RoboCam no telefone 1 e conectar o telefone 1 e o telefone 2 ao mesmo roteador WiFi, você pode se conectar ao servidor RoboCam (para o telefone 1) por meio do navegador (do telefone 2). Para fazer isso, você precisa escrever o endereço no campo de endereço do navegador que será mostrado no RoboCam, por exemplo, http://192.168.1.2:8088
Essa é a breve descrição de como o controle acontece. Depois de se conectar ao servidor RoboCam através de um navegador do Phone 2 e entrar no aplicativo RoboCam Web, você verá tudo o que a câmera do Phone 1 vê. Anexe o telefone 1 ao seu robô, para que sua câmera seja direcionada para frente. O aplicativo da Web no Phone 2 pode ter de 1 a 4 joysticks para controlar o robô, dependendo das configurações. Quando você toca no joystick, as coordenadas dos pontos de toque são transferidas para o aplicativo RoboCam no telefone 1 e, dependendo das configurações do joystick, elas são transformadas nos comandos do motor EV3 ou enviadas para as caixas de correio EV3. Se as coordenadas forem enviadas para caixas de correio, você precisará escrever um programa EV3 adicional para processá-las. Os nomes das caixas postais são os seguintes: x e y - joystick 1, we z - joystick 2, a e b - joystick 3, c e d - joystick 4.
Por padrão, o aplicativo tem uma configuração para apenas um dos robôs - "EV3 Researcher", que você pode ver no vídeo. Você pode montar o EV3 Researcher a partir de um kit educacional do LEGO Mindstorms EV3 (45544). : https://goo.gl/yPU4sa
Guia de início rápido (apenas para aqueles que têm um kit educacional de LEGO Mindstorms EV3 (45544)):
1. Monte o Pesquisador EV3 (a instrução: https://goo.gl/yPU4sa), ligue-o e verifique se o Bluetooth está funcionando.
2. Instale o aplicativo RoboCam em um smartphone (doravante, Telefone 1).
3. Ligue o Bluetooth do telefone 1 e verifique se o telefone 1 e o EV3 estão conectados via Bluetooth (eles devem estar emparelhados).
4. Conecte o telefone 1 e o smartphone que você usará para controlar o robô (daqui em diante, telefone 2) no mesmo roteador Wi-Fi.
5. Inicie um servidor RoboCam. Para isso, aperte o botão verde esquerdo.
6. Conecte o telefone 1 ao robô. Para isso, aperte o botão magenta no meio.
7. Abra o Google Chrome no telefone 2 e vá para o link mostrado no aplicativo RoboCam no telefone 1.
8. Faça o login no telefone 2 (por padrão use admin e 123).
9. No telefone 2 aparecem dois joysticks e vídeo da câmera do telefone 1. Bloqueie o telefone e conecte-o ao robô.
10. Agora você pode controlar seu robô pelo telefone 2.
Se você tiver um kit inicial do LEGO Mindstorms EV3 (31313) ou quiser controlar outro robô EV3 em vez do Pesquisador EV3, será necessário configurar o aplicativo RoboCam. Veja as configurações do RoboCam.
Para usar o aplicativo, você precisa saber duas coisas: como configurar a conexão e como o controle acontece.
Esse é o manual rápido sobre como definir a conexão padrão. Necessidade: Robô EV3, smartphone Android com o RoboCam instalado (doravante, Phone 1) e o smartphone ou tablet (Android, iOS ou Windows) com um navegador moderno com suporte a HTML5 (doravante, o telefone 2). O telefone 1 é conectado ao EV3 via Bluetooth (os dispositivos devem estar pré-emparelhados!). Depois de iniciar o servidor RoboCam no telefone 1 e conectar o telefone 1 e o telefone 2 ao mesmo roteador WiFi, você pode se conectar ao servidor RoboCam (para o telefone 1) por meio do navegador (do telefone 2). Para fazer isso, você precisa escrever o endereço no campo de endereço do navegador que será mostrado no RoboCam, por exemplo, http://192.168.1.2:8088
Essa é a breve descrição de como o controle acontece. Depois de se conectar ao servidor RoboCam através de um navegador do Phone 2 e entrar no aplicativo RoboCam Web, você verá tudo o que a câmera do Phone 1 vê. Anexe o telefone 1 ao seu robô, para que sua câmera seja direcionada para frente. O aplicativo da Web no Phone 2 pode ter de 1 a 4 joysticks para controlar o robô, dependendo das configurações. Quando você toca no joystick, as coordenadas dos pontos de toque são transferidas para o aplicativo RoboCam no telefone 1 e, dependendo das configurações do joystick, elas são transformadas nos comandos do motor EV3 ou enviadas para as caixas de correio EV3. Se as coordenadas forem enviadas para caixas de correio, você precisará escrever um programa EV3 adicional para processá-las. Os nomes das caixas postais são os seguintes: x e y - joystick 1, we z - joystick 2, a e b - joystick 3, c e d - joystick 4.
Por padrão, o aplicativo tem uma configuração para apenas um dos robôs - "EV3 Researcher", que você pode ver no vídeo. Você pode montar o EV3 Researcher a partir de um kit educacional do LEGO Mindstorms EV3 (45544). : https://goo.gl/yPU4sa
Categoria : Educação
Pesquisas associadas
Bem legal mas tem que ter um carrinho de controle remoto para usar o celular como controle mas não tenho carrinho, achei bom pra quem tem, e não tem anúncios perfeito