
Tello Flight Control
aplicativo Demonstrator para "SDK controle de vôo" do zangão Tello.
Manual de Tello SDK: https://www.ryzerobotics.com/tello/downloads
O código fonte para esta versão inicial está disponível no GitHub.
GitHub: https://github.com/Korpporate/TelloFlightControl/tree/master
TelloFlightControl foi testado com os seguintes dispositivos:
Samsung S6 (Android 7)
Samsung S3 (Android 4.4)
Samsung Nota Pro 12.2 tablet (Android 5)
Conecte o drone Tello para o telefone ou tablet Wi-Fi, em seguida, iniciar o aplicativo TelloFlightControl.
Seu primeiro "cmd" deve ser "comando", para colocar o robô em "modo de comando". A resposta do zumbido deve ser "OK".
Pressione o botão flutuante vermelho "info" para ver uma lista rápida dos tipos de comando.
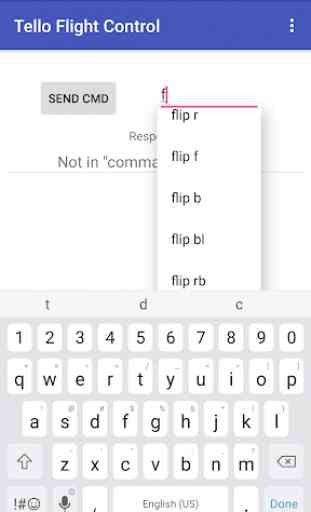
Como você começar a digitar, aparecerá uma lista de comandos pré-definidos. Você pode usar a pré-configuração, ou modificar parâmetros. Exemplo: selecione "deixou 40", em seguida, editar a "esquerda 53".
Pousando o avião:
O zumbido pode receber o comando "terra" é várias maneiras:
1. Enviar comando "terra".
2. Pressione o botão "Enviar Cmd", sem texto comando inserido.
3. Bloqueio ou dormir o telefone.
4. Ocultar o aplicativo com o botão "Home".
5. Outro aplicativo aparece na frente do aplicativo TelloFlightControl execução.
Introduzir comandos antes do anterior é concluída:
Ao inserir comandos, você terá que esperar para o comando anterior ao fim. O zangão Tello não indica "ocupado" ou "acabado". Você terá que identificar visualmente que o comando atual foi concluída.
Exemplo: Se você definir o parâmetro "velocidade" baixa (1-10), pode levar um longo tempo para se mover. Se você digitar um novo comando, em seguida, você receberá uma resposta "erro".
Manual de Tello SDK: https://www.ryzerobotics.com/tello/downloads
O código fonte para esta versão inicial está disponível no GitHub.
GitHub: https://github.com/Korpporate/TelloFlightControl/tree/master
TelloFlightControl foi testado com os seguintes dispositivos:
Samsung S6 (Android 7)
Samsung S3 (Android 4.4)
Samsung Nota Pro 12.2 tablet (Android 5)
Conecte o drone Tello para o telefone ou tablet Wi-Fi, em seguida, iniciar o aplicativo TelloFlightControl.
Seu primeiro "cmd" deve ser "comando", para colocar o robô em "modo de comando". A resposta do zumbido deve ser "OK".
Pressione o botão flutuante vermelho "info" para ver uma lista rápida dos tipos de comando.
Como você começar a digitar, aparecerá uma lista de comandos pré-definidos. Você pode usar a pré-configuração, ou modificar parâmetros. Exemplo: selecione "deixou 40", em seguida, editar a "esquerda 53".
Pousando o avião:
O zumbido pode receber o comando "terra" é várias maneiras:
1. Enviar comando "terra".
2. Pressione o botão "Enviar Cmd", sem texto comando inserido.
3. Bloqueio ou dormir o telefone.
4. Ocultar o aplicativo com o botão "Home".
5. Outro aplicativo aparece na frente do aplicativo TelloFlightControl execução.
Introduzir comandos antes do anterior é concluída:
Ao inserir comandos, você terá que esperar para o comando anterior ao fim. O zangão Tello não indica "ocupado" ou "acabado". Você terá que identificar visualmente que o comando atual foi concluída.
Exemplo: Se você definir o parâmetro "velocidade" baixa (1-10), pode levar um longo tempo para se mover. Se você digitar um novo comando, em seguida, você receberá uma resposta "erro".
Categoria : Ferramentas
Pesquisas associadas